
ฟิสิกส์ของปฏิสัมพันธ์ระหว่าง แมว กับคน … เมื่อน้องแมวถูกนำมาช่วยสอนฟิสิกส์ ( พฤติกรรมที่น่าฉงน และบทสรุป )
18-03-2025 อ่าน 2,418
ฟิสิกส์ของปฏิสัมพันธ์ระหว่าง แมว กับคน … เมื่อน้องแมวถูกนำมาช่วยสอนฟิสิกส์ ( พฤติกรรมที่น่าฉงน และบทสรุป )

รูปที่ 7: รูปตัวอย่างแมวน่ารักจากอินเตอร์เน็ต ( ที่มา: https://in.pinterest.com/pin/1042864857459167879/ )
ในตอนก่อนหน้านี้ เราได้วิเคราะห์พฤติกรรม 5 อย่างแรกของน้องแมว ซึ่งเป็นผลลัพธ์โดยตรงของสมการแมวเหมียวไปแล้ว พฤติกรรมต่อมาที่เราจะพูดถึงกันคือพฤติกรรมซูมมี่ส์ (Zoomies) หรือศัพท์ทางการคือ frenetic random activity periods (FRAPs) ซึ่งพบได้ทั้งในสุนัข และแมวอยู่บ่อย ๆ โดยน้อง ๆ จะมีลักษณะที่เราเรียกกันว่า อะเลิร์ทเกิน คือเต็มเปรี่ยมไปด้วยพลัง จนต้องวิ่งไปมาจากที่หนึ่งไปยังอีกที่หนึ่ง ซึ่งมักเกิดในช่วงค่ำคืน พฤติกรรมที่ 6: ยามค่ำคืน น้องแมวมักจะวิ่งแบบสุ่มข้ามฟากของบ้านไปมา เราเรียกพฤติกรรมแบบนี้ว่า ซูมมี่ส์ (zoomies) ในแบบจำลองของเรานั้น เราจะมองว่ามุมที่น้องแมววิ่งไปมานั้นก็คือหลุมสองหลุมที่อยู่คนละฝั่งเมื่อเทียบกับตำแหน่งที่เราอยู่ ซึ่งคือตรงกลางระหว่างหลุมนั่นเอง แต่อย่างไรก็ตาม สมการแมวเหมียวของเรา ซึ่งเป็นสมการที่ถูกพัฒนามาจากกลศาสตร์ของนิวตันนั้น แสดงพฤติกรรมแบบนิยัตินิยม (determinism) คือมีผลลัพธ์ที่เหมือนถูกกำหนดไว้แล้วภายใต้เงื่อนไขตั้งต้นหนึ่ง ๆ หมายความว่าสุดท้ายแล้วน้องก็จะวิ่งจากหลุมหนึ่งไปยังอีกหลุมนึง และถูกหน่วงจนหยุดอยู่ที่หลุมใดหลุมหนึ่งด้วยความหน่วง ซึ่งถูกทำนายได้หากเรารู้ข้อมูลตั้งต้น สิ่งนี้ต่างจากการสังเกตที่ว่าพฤติกรรมซูมมี่ส์นั้นควรจะมีลักษณะสุ่ม (random) แต่สมการแมวเหมียวของเราบอกว่าจะไม่สุ่ม ดีที่สุดที่เราอาจทำได้กับสมการแมวเหมียวเพื่อให้ได้ผลลัพธ์ที่ใกล้เคียงการสุ่มที่สุดคือการก่อให้เกิดความอลวน (chaos) โดยทำให้ระบบนั้นอ่อนไหวต่อการเปลี่ยนแปลงสถานะเริ่มต้นอันน้อยนิด ก็คือเริ่มต้นต่างกันเพียงเล็กน้อย แต่ผลลัพธ์สุดท้ายเมื่อเวลาผ่านไปนาน ๆ กลับต่างกันเป็นโยชน์ บางคนอาจคุ้นกับชื่อของปรากฏการณ์ผีเสื้อขยับปีก (butterfly effect) ซึ่งมีพฤติกรรมลักษณะเดียวกันครับ
เราสามารถอธิบายพฤติกรรมซูมมี่ส์ได้โดยการเปลี่ยนสมการแมวเหมียวของเรา ให้เป็นสมการแบบสุ่ม (stochastic equation) ซึ่งเป็นเทคนิคที่เหมาะกับระบบที่มีความไม่แน่นอนสูง เช่น การที่อนุภาคละอองเกสรดอกไม้ถูกชนอย่างทำนายไม่ได้โดยโมเลกุลของน้ำ จนเกิดการเคลื่อนที่ เรียกว่า การเคลื่อนที่แบบบราวน์ หรือ Brownian motion ( ลองดูบทความเก่าของสมาคมฟิสิกส์ไทย เพิ่มเติมได้ครับ ) ทำให้สมการแมวเหมียวของเราเป็น
\(m\frac{d^2x}{dt^2} = -\frac{d}{dx}V^{(\delta)}_{cat}-\epsilon\frac{dx}{dt} + \sigma f(t)\) .....สมการที่ 1
โดยที่
 เป็นค่าคงที่ และ
เป็นค่าคงที่ และ 
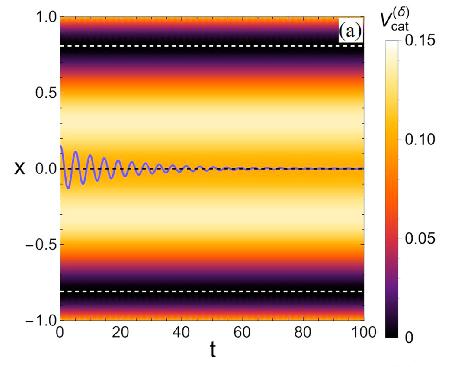
รูปที่ 8: แผนภาพตำแหน่ง และเวลา โดยมีพื้นหลังเป็นแถบสีแสดงความลึกของหลุมศักย์ที่ตำแหน่งต่าง ใช้สำหรับประกอบการอธิบายพฤติกรรมที่ 6 ( ภาพจากบทความต้นฉบับ [1] )
จากรูปที่ 8 เราจะพบว่าสมการแมวเหมียวแบบสุ่มของเราสามารถอธิบายการเคลื่อนที่กลับไปกลับมาแบบสุ่มระหว่างหลุมสมดุลได้แล้ว โดยจากรูปบน ลูกศรสีเขียวชี้จุดที่เกิดพฤติกรรมซูมมี่ส์ เมื่อเจ้าเหมียววิ่งจากหลุมนึงไปยังอีกหลุม เขาจะหยุดอยู่ครู่หนึ่งก่อนจะวิ่งกลับมาที่หลุมเดิม แล้วจึงทำวนแบบนี้ซ้ำไปมา ทีนี้หากเรารองปรับปริมาณความหน่วง
และความอ่อนไหวต่อสิ่งเร้า  เราจะเห็นพฤติกรรมซูมมี่ส์ที่ต่างกันระหว่างแมวเด็ก กับแมวโต กล่าวคือถ้าความหน่วงมีค่าน้อย ๆ และสิ่งเร้ามีอิทธิพลกับน้องมาก
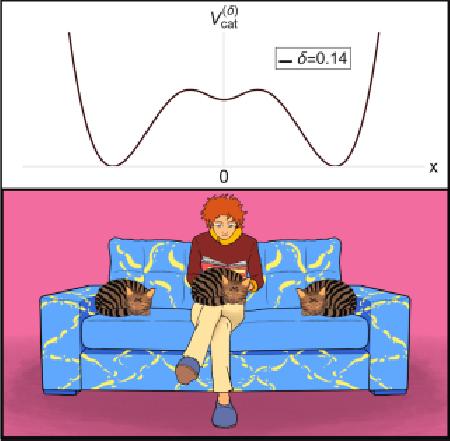
เราจะเห็นพฤติกรรมซูมมี่ส์ที่ต่างกันระหว่างแมวเด็ก กับแมวโต กล่าวคือถ้าความหน่วงมีค่าน้อย ๆ และสิ่งเร้ามีอิทธิพลกับน้องมาก สุดท้าย สำหรับพฤติกรรมที่ 7: น้องแมวครางด้วยเสียงสั่นอย่างเบา ๆ (purr) ออกมาเมื่อเขาถูกใจในฝีมือการลูบของคน หากลูบน้อง แล้วน้องครางออกมาเบา ๆ นั่นคือสัญญาณที่ดีครับ นี่คือกระบวนการสร้างเสถียรภาพ ( stabilisation) คุณกำลังได้รับเกียรติให้ได้ปรนนิบัติน้องโดยการลูบ หรือเกาให้น้องต่อไป ระบบนี้มีความคล้ายกับระบบลูกตุ้มแบบกลับหัว (inverted pendulum) หรือรู้จักกันในชื่อลูกตุ้มของคาปิตซา (Kapitza’s pendulum) ลองนึกถึงกิจกรรมเด็กเล่นที่วางแท่งไม้ไว้บนมือ แล้วเราพยายามขยับมือเพื่อรักษาสมดุลของไม้ไม่ให้หล่น เพราะโดยปกติไม้ที่ตั้งอยู่นั้นเป็นสมดุลไม่เสถียร แต่เมื่อมีการให้การสั่นที่มีความถี่สูง และมีช่วงการเคลื่อนที่แคบ ก็จะทำให้เกิดสมดุลขึ้น คุณ Anxo เสนอว่าการครางของแมวเป็นกระบวนการสร้างเสถียรภาพในลักษณะเดียวกัน คือการสั่นนี้จะไปสร้างความผูกพันยังผล (effective bond) ระหว่างแมว กับคน ทำให้เกิดความเสถียรมากขึ้นที่จุดที่คนอยู่ สังเกตได้จากรูปที่ 9 กล่าวคือบริเวณที่เคยเป็นเนิน ซึ่งคือสมดุลไม่เสถียรนั้นกลับกลายเป็นหลุมภายใต้เงื่อนไขบางประการ
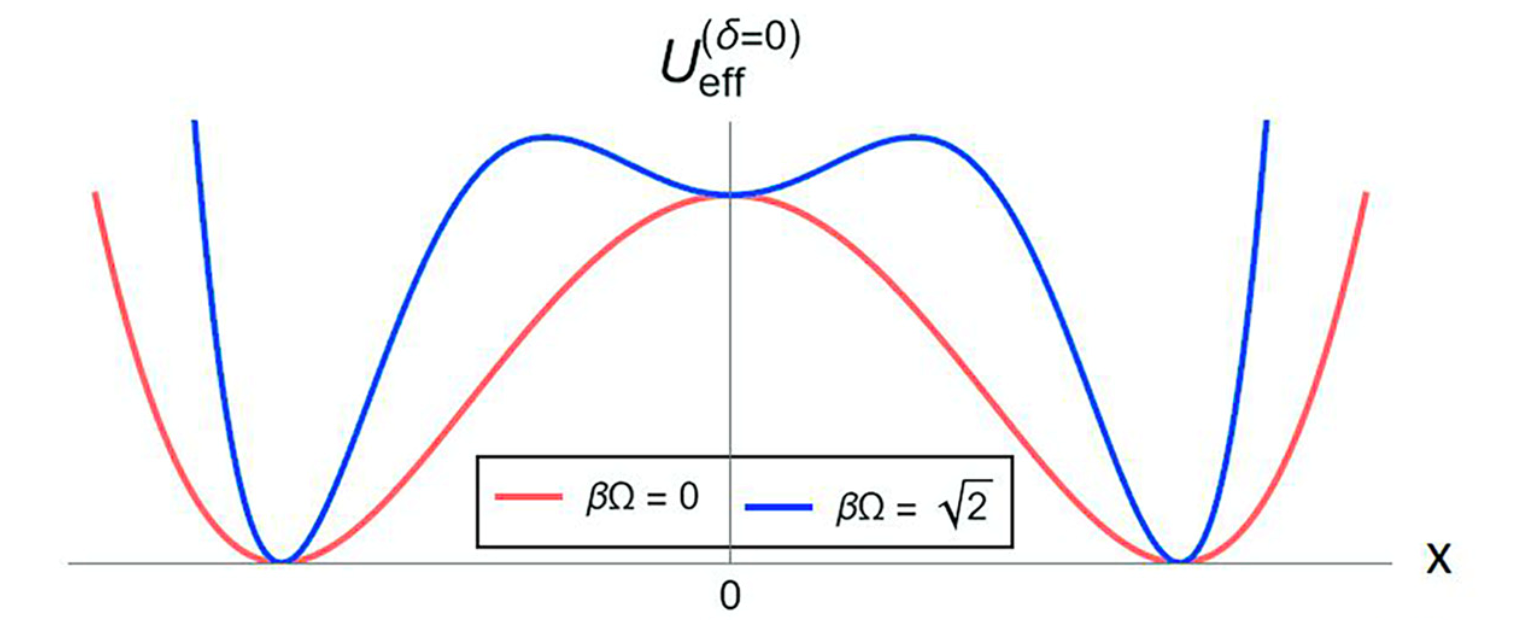
รูปที่ 9: กราฟแสดงฟังก์ชันความศักย์ยังผลที่เมื่อ
เป็น \( \sqrt{2}\) ตำแหน่ง
ตำแหน่ง เหตุที่เป็นเช่นนี้เกิดจากการที่พจน์ที่แสดงถึงการสั่นที่ความถี่สูง และมีช่วงการเคลื่อนที่แคบนั้นถูกเพิ่มเข้าไปในสมการแมวเหมียวของเรา ปริมาณนี้เมื่อใส่เข้าไปจะทำให้ฟังก์ชันศักย์เดิมเกิดการเปลี่ยนแปลง แทนด้วย U
\(\left.\frac{d^2}{d}U_{eff}\right |_ {x=0} = \begin{cases} -2 +2\frac{(βΩ)^2}{m} \text{if } {δ=0 }\\ 2+2\frac{(βΩ)^2}{m} \text{if } {δ>0 } \end{cases}\) .....สมการที่ 2
เมื่อ \(\bar{x}\)
 และ
และ  คือระยะไกลสุดของการสั่นออกจาก \(\bar{x}\) ( แอมพลิจูดของการสั่น ) และความถี่ของการสั่นตามลำดับ เราพบว่าการครางของแมวนั้นเป็นกระบวนการสร้างความผูกพันโดยชั่วคราว ที่แมวจะยอมแสร้งทำเป็นติดคนที่ลูบเกาให้เขาชั่วขณะหนึ่งจนกว่าน้องแมวเขาจะพอใจนั่นเอง
คือระยะไกลสุดของการสั่นออกจาก \(\bar{x}\) ( แอมพลิจูดของการสั่น ) และความถี่ของการสั่นตามลำดับ เราพบว่าการครางของแมวนั้นเป็นกระบวนการสร้างความผูกพันโดยชั่วคราว ที่แมวจะยอมแสร้งทำเป็นติดคนที่ลูบเกาให้เขาชั่วขณะหนึ่งจนกว่าน้องแมวเขาจะพอใจนั่นเองตอนนี้เราก็ได้รู้กันแล้วนะครับว่าฟิสิกส์ถูกนำมาใช้อธิบายพฤติกรรมต่าง ๆ ที่พบเห็นได้โดยทั่วไปของแมวอย่างไร คุณ Anxo เขาได้เริ่มจากการพยายามมองน้องแมวของเขาเสมือนเป็นจุดมวลที่อยู่ภายใต้ความศักย์ที่ถูกเหนี่ยวนำขึ้นโดยมนุษย์ จากนั้นจึงเขียนสมการการเคลื่อนที่ ที่เราเรียกกันว่าสมการแมวเหมียวขึ้นมา พร้อมกับเสกฟังก์ชันความศักย์ที่สุดท้ายแล้วช่วยให้เราสามารถอธิบายพฤติกรรมต่าง ๆ ของเจ้าเหมียวได้โดยผ่านการพิจารณาหลุม และกำแพงศักย์ คุณ Anxo เขาตั้งใจว่างานวิจัยนี้ของเขาจะช่วยให้นักเรียน นักศึกษาที่กำลังเรียนวิชากลศาสตร์แบบฉบับเบื้องต้น เห็นภาพมากขึ้นผ่านตัวอย่างที่สมจริง ไม่เป็นนามธรรมจนเกินไป อีกทั้งยังมีเรื่องราวที่น่าสนใจชวนให้ค้นหา งานนี้ยังมีทางไปต่อได้อีกมากครับสำหรับคนที่สนใจ อาจลองพยายามจำลองปฏิสัมพันธ์ระหว่างแมวกับแมวด้วยกัน แมวกับสุนัข สุนัขกับคน หรือแมวกับคนมากกว่าหนึ่งคนก็ได้ คุณ Anxo ได้เปิดทางไว้ให้เราได้ไปคิดต่อแล้วครับ งานนี้เป็นงานที่น่าสนใจมากครับ ไม่แน่ว่าอาจจะได้รางวัลอิกโนเบล (Ig Nobel Prize) ในสักวันก็เป็นได้
ผู้เขียนขอทิ้งท้ายอีกสักหน่อยนะครับ… หากพิจารณาบทความต้นฉบับอย่างถี่ถ้วนแล้วจะพบว่า บทความนี้ไม่เพียงแต่บอกเราว่า เราจะอธิบายพฤติกรรมของแมวเมื่อมีปฏิสัมพันธ์กับคนอย่างไรเพียงเท่านั้น แต่ยังแสดงให้เห็นถึงกระบวนการที่เราสามารถนำฟิสิกส์ และกระบวนการทางวิทยาศาสตร์อื่น ๆ มาใช้อธิบายสิ่งรอบตัวเรา สร้างแบบจำลองอย่างง่ายผ่านสิ่งที่สังเกตเห็น แล้วนำคณิตศาสตร์มาช่วยให้เราเข้าใจ และเห็นความเป็นไปของระบบได้อย่างละเอียดยิ่งขึ้น ทักษะเหล่านี้ถูกบ่มเพาะให้กับนักเรียนในหลาย ๆ ประเทศ แต่น่าเสียดายที่ประเทศของเราอาจให้ความสำคัญกับเรื่องนี้น้อยไปหน่อยเมื่อเทียบกับการทำข้อสอบได้ การเรียนฟิสิกส์แบบเดิม ๆ หรือการแข่งขันฟิสิกส์แบบเดิม ๆ นั้นอาจไม่ค่อยช่วยให้ผู้เรียนได้ฝึกการสร้างแบบจำลองเพื่ออธิบายสิ่งรอบตัวแบบนี้เท่าไร ผู้เขียน/แปล มีความเห็นว่าการได้ทำโครงงานในหัวข้อที่เหมาะสม โดยเฉพาะอย่างยิ่งโครงงานที่เปิดโอกาสให้ผู้เรียน/ผู้ศึกษาได้พยายามหาคำตอบในสิ่งที่เขาอยากรู้ด้วยวิทยาศาสตร์ โดยไม่ต้องกังวลว่าจะตอบคำถามของคุณครูอย่างไรว่า “โครงงานนี้มีประโยชน์อย่างไร เอาไปช่วยคน ช่วยสังคมได้อย่างไรบ้าง” จะเปิดโอกาสให้ผู้เรียนได้ฝึกฝนทักษะเหล่านี้ ซึ่งจะเป็นประโยชน์อย่างยิ่ง และทำให้ผู้เรียนเห็นภาพว่าเขาสามารถเอาคณิตศาสตร์ ฟิสิกส์ หรือกระบวนการทางวิทยาศาสตร์ต่าง ๆ ไปใช้ประโยชน์ในชีวิตประจำวันของเขาได้อย่างไรบ้าง การแข่งขันโครงงาน หากไม่นับว่า กรรมการบางท่านชอบมองหาแต่ประโยชน์เชิงประยุกต์จนเกินไป กระทั่งลืมไปว่าในระดับนานาชาตินั้น งานที่ได้รับรางวัลก็มีมาจากงานที่เกิดจากการใคร่รู้ของผู้ศึกษา ซึ่งอาจไม่ได้มีประโยชน์อย่างเป็นรูปธรรมอื่นนอกเสียจากความรู้ความเข้าใจที่มากขึ้นด้วยเช่นกัน อย่างงานการจำลองการเคลื่อนที่ของกิ้งกือที่เด็กนักเรียนไทยเคยไปชนะรางวัลจากเวทีระดับโลกเมื่อนานมาแล้ว [2] หรือกระทั่งการแข่งขันอื่น ๆ อาทิ การแข่งขันฟิสิกส์สัประยุทธ์ที่เปิดโอกาสให้ผู้ศึกษาได้ฝึกแก้โจทย์วิจัยในระบบจริง ซึ่งมีลักษณะเดียวกับบทความต้นฉบับนี้ ก็เป็นกิจกรรมที่ควรได้รับการสนับสนุน เพื่อให้ผู้ศึกษาได้มีโอกาสพัฒนาทักษะที่เป็นประโยชน์ อันจะเป็นประโยชน์กับตัวเขาในอนาคต
สุดท้ายแล้วจะเห็นได้ว่าฟิสิกส์นั้นไม่ใช่เรื่องที่ไกลตัว อย่างที่หลายคนคิด ไม่ใช่วิชาที่ใช้สมการที่ยาวเหยียด และซับซ้อนเพียงเพื่ออธิบายว่าลูกบอลกลิ้งได้อย่างไรเท่านั้น [3] แต่ฟิสิกส์คือหลักคิด คือการมองไปที่ธรรมชาติรอบตัวเราเพื่อที่จะพยายามทำความเข้าใจมัน เมื่อเข้าใจแล้ว เราจึงสามารถทำนาย ควบคุม และสร้างประโยชน์นานาต่อจากนั้นได้ นวัตกรรมต่าง ๆ ที่พลิกโลกล้วนแตกหน่อมาจากการค้นพบพื้นฐานทางฟิสิกส์เกือบทั้งนั้น [4, 5] บางครั้งการที่เราไปโฟกัสแต่กับการประยุกต์มากจนเกินไปก็อาจไม่ใช่ทิศทางที่ถูกต้อง และมั่นคงที่สุดในระยะยาวก็เป็นได้ เพราะท้ายที่สุดแล้วต้นไม้ที่จะเติบโตจนสูงทยานฟ้า และดำรงอยู่ได้นั้น ย่อมต้องมีรากฐานที่มั่นคง … ซึ่งนี่ก็อธิบายได้ ด้วยฟิสิกส์เช่นกันครับ
เอกสารอ้างอิง:
[1] Biasi, A. (2024). On cat–human interaction from the viewpoint of physics: An equation of motion. American Journal of Physics, 92(11), 827-833.
[2] https://mgronline.com/science/detail/9470000078991
[3] https://www.pinterest.com/pin/physics-definition-funny-coffee-or-tea-mug-etsy--155303887411585189/
[4] Kogelschatz, U. (2002). Industrial innovation based on fundamental physics. Plasma Sources Science and Technology, 11(3A), A1.
[5] Lauterbur, P. C. (1973). Image formation by induced local interactions: examples employing nuclear magnetic resonance. nature, 242(5394), 190-191.
บทความโดย:
ภัทรพล ธนลิขิต
นักวิจัยด้านฟิสิกส์พลังงานสูงเชิงทฤษฎี และฟิสิกส์ของอะตอมเย็นสุดขีดเชิงปฏิบัติการ
ภาควิชาฟิสิกส์ สถาบันชั้นสูงวิทยาศาสตร์ และเทคโนโลยี เกาหลี
บทความฟิสิกส์ล่าสุด
 ฟิสิกส์ของปฏิสัมพันธ์ระหว่าง แมว กับคน … เมื่อน้องแมวถูกนำมาช่วยสอนฟิสิกส์ ( ตอนที่ 1: เกริ่นนำ )
17-03-2025
ฟิสิกส์ของปฏิสัมพันธ์ระหว่าง แมว กับคน … เมื่อน้องแมวถูกนำมาช่วยสอนฟิสิกส์ ( ตอนที่ 1: เกริ่นนำ )
17-03-2025
 หรือว่าเราอาศัยอยู่ในโฮโลแกรม ?
24-10-2024
หรือว่าเราอาศัยอยู่ในโฮโลแกรม ?
24-10-2024
