
ฟิสิกส์ของปฏิสัมพันธ์ระหว่าง แมว กับคน … เมื่อน้องแมวถูกนำมาช่วยสอนฟิสิกส์ ( ตอนที่ 1: เกริ่นนำ )
17-03-2025 อ่าน 2,588
ฟิสิกส์ของปฏิสัมพันธ์ระหว่าง แมว กับคน … เมื่อน้องแมวถูกนำมาช่วยสอนฟิสิกส์ ( ตอนที่ 1: เกริ่นนำ )

รูปที่ 1 รูปตัวอย่างแมวน่ารักจากอินเตอร์เน็ต (ที่มา: https://www.pawlicy.com/blog/cat-photos-for-monday/ )
เมื่อไม่นานมานี้ วารสารฟิสิกส์อเมริกัน (American Journal of Physics) ฉบับล่าสุด ได้เผยแพร่บทความชื่อว่าปฏิสัมพันธ์ระหว่างแมว กับมนุษย์จากมุมมองทางฟิสิกส์ ผ่านสมการการเคลื่อนที่ (On cat-human interaction from the viewpoint of physics: An equation of motion) ซึ่งเขียนโดยคุณ Anxo Biasi จากมหาวิทยาลัย Sorbonne ประเทศฝรั่งเศส [1] ซึ่งบทความนี้ได้ถูกเผยแพร่ต่อ และมีการพูดคุยกันบ้างแล้วในหมู่นักฟิสิกส์ไทย แต่ยังไม่ได้เป็นวงกว้างมาก ผู้เขียนจึงอยากนำเรื่องนี้มาเล่าให้ทุกคนฟังโดยทั่วกัน ณ ที่นี้ครับ
แมวนั้นเป็นสัตว์ที่มีเสน่ห์ในตัว คือมีรูปลักษณ์ที่น่ารัก และมีพฤติกรรมที่บางครั้งก็แปลก ตลก บ้างก็ดึงดูดจนทำให้เราตกหลุมรักเจ้าสิ่งมีชีวิตที่น่าฟัดน่ากอดตัวนี้ ในช่วงหลายปีมานี้ความโด่งดังของเจ้าเหมียวได้ขยายไปทั่วจนได้ครอบครองพื้นที่บนโซเชียลมีเดียอย่างมีนัยสำคัญ คือมีบัญชีต่าง ๆ ที่เกี่ยวกับแมวอยู่หลายบัญชี และบัญชีเหล่านั้นก็มียอดเข้าชม และยอดผู้ติดตามนับล้านเลยทีเดียว ส่วนหนึ่งนอกเหนือจากหน้าตาที่น่ารักตะมุตะมิของน้องแล้ว ก็คงมาจากพฤติกรรมที่มีลักษณะที่จำเพาะของน้องที่มีส่วนดึงดูดความสนใจของเราตามที่ได้กล่าวไว้ข้างต้นนั่นเอง แต่อะไรกันล่ะ ที่ทำให้เจ้าเหมียวแสดงลักษณะจำเพาะเหล่านี้ออกมา?
คุณ Anxo เล่าว่าแรงบันดาลใจที่ทำให้เขาสนใจ และเริ่มหาคำตอบให้กับคำถามเหล่านี้ก็มาจากแมวของเขาเองนี่แหละครับ เขาบอกว่าตั้งแต่เขาได้เจ้าเหมียวตัวนี้มา เขาก็เริ่มสังเกตเห็นพฤติกรรมประหลาดเมื่อเจ้าเหมียวเข้ามามีปฏิสัมพันธ์กับเขา และพฤติกรรมเหล่านี้ก็ได้เกิดซ้ำแล้วซ้ำเล่า จนเขาเริ่มพยายามมองการเคลื่อนที่ของเจ้าเหมียวเทียบกับการเคลื่อนที่ของจุดอนุภาค (point particle) ที่เรามักทำกันเป็นปกติในวิชาฟิสิกส์ … นักฟิสิกส์ก็อย่างนี้แหละครับ บางครั้งเราก็สมมติให้วัว หรือไก่เป็นทรงกลมเหมือนกับลูกบอล เพื่อให้ง่ายต่อการพิจารณา [2] … หลังจากพิจารณาเช่นนั้นแล้วเขาก็พบว่าพลวัต ( การเปลี่ยนแปลงในเวลาอันเนื่องมาจากอันตรกิริยา เช่น แรง ในกรณีนี้คือการมีปฏิสัมพันธ์ ) ของเจ้าเหมียวนั้นง่ายเกินคาด ทำได้โดยการมองผ่านจุดสมดุลแบบเสถียร และไม่เสถียรภายใต้สิ่งเร้าจากภายนอกเพียงเท่านั้นเองครับ ( บางคนอาจจะเอ่อ… คืออะไรนะ บางท่านอาจถามว่า ง่ายกี่โมง เดี๋ยวเรามาดูไปพร้อมกันต่อจากนี้ครับ ) เมื่อจับทางได้แล้วคุณ Anxo ก็เริ่มพยายามนึกถึงพฤติกรรมอันเป็นเอกลักษณ์ต่าง ๆ ของเจ้าเหมียวของเขาที่เขาสังเกตเห็นในแต่ละวัน ทั้งจากที่เคยพูดคุยกับเพื่อนหลายคน จากที่เคยได้ยินได้ฟังผ่านทางอินเตอร์เน็ต รวมถึงจากบทความทางวิชาการต่าง ๆ เพื่อนำมาพัฒนาแบบจำลองทางคณิตศาสตร์โดยที่สำคัญ ๆ มีดังนี้
พฤติกรรมที่ 1: น้องแมวโดยปกติมักจะ ( นอน ) พัก โดยทิ้งระยะห่างจากคนไว้ประมาณหนึ่ง
พฤติกรรมที่ 2: เมื่อน้องแมวมา ( นอน ) พักบนตัวคน ไม่ว่าจะที่ตัก บนท้อง หรือที่หลังเรานั้น สิ่งเร้าเพียงน้อยนิดก็สามารถกระตุ้นให้น้องลุกออกจากตัวเราไปได้ อาทิ เห็นแมลงบิน ได้ยินเสียงที่เบาเพียงนิดเดียว ( จนมนุษย์ไม่อาจได้ยิน ) หรือแม้แต่การสลายตัวเป็นอนุภาคเบต้าของอะตอมในกาแล็กซีข้างเคียงก็ด้วย ( อันหลังสุดนี่ออกแนวประชดนะครับ ) สิ่งเร้า หรือสิ่งรบกวนนี้ต้องรุนแรงแค่ไหนจึงจะทำให้น้องลุกออกไปนั้นขึ้นกับว่าน้องติดคนที่เขาทับอยู่มากแค่ไหน
พฤติกรรมที่ 3: เมื่อน้องแมวถูกลูบตามตัว น้องจะเคลื่อนที่ไปมาเป็นการเคลื่อนที่แบบสั่น
พฤติกรรมที่ 4: เมื่อน้องแมวถูกเรียกโดยคน เขาจะไม่ค่อยตอบรับ
พฤติกรรมที่ 5: เมื่อน้องแมวตัดสินใจเดินเข้าหาคนที่เรียกเขา น้องมักถูกดึงดูดความสนใจไปได้ง่ายระหว่างทาง ทำให้มาไม่ถึง
พฤติกรรมที่ 6: ยามค่ำคืน น้องแมวมักจะวิ่งแบบสุ่มข้ามฟากของบ้านไปมา เราเรียกพฤติกรรมแบบนี้ว่า ซูมมี่ส์ (zoomies)
พฤติกรรมที่ 7: น้องแมวครางด้วยเสียงสั่นอย่างเบา ๆ (purr) ออกมาเมื่อเขาถูกใจในฝีมือการลูบของคน
น้องแมวที่บ้านคุณผู้อ่าน หรือที่คุณผู้อ่านเคยเจอเป็นแบบนี้เหมือนกันไหมครับ?
คุณ Anxo ได้กำชับไว้ในบทความว่าแบบจำลองของเขานั้นสนใจแค่ ปฏิสัมพันธ์ของแมวกับมนุษย์ในระบบที่มีแมวหนึ่งตัว และมีมนุษย์ที่อยู่นิ่ง ๆ เพียงหนึ่งคนเท่านั้น และกล่าวอีกว่าพฤติกรรมทั้ง 7 นี้อาจไม่ได้พบเจอเหมือนกันในแมวทุกตัวก็ได้ โดยแมวแต่ละตัวจะแสดงพฤติกรรมทั้ง 7 นี้ออกมามากน้อยแตกต่างกันไปแต่ละตัว อีกทั้งยังออกตัวว่างานนี้เป็นงานเชิงทฤษฎีที่มุ่งหวังผลในเชิงการศึกษาฟิสิกส์ โดยไม่ได้มีการทดลองอะไรในสัตว์ ( การทำการทดลองในสัตว์มีขั้นตอนที่ยุ่งยาก และจำเป็นต้องมีเอกสารรับรองครับ จึงต้องออกตัวครับ )
ทีนี้เราจะมาดูที่สมการแมวเหมียว (cat’s equation) กันนะครับ เนื่องจากคุณ Anxo มีวัตถุประสงค์แต่แรกแล้วว่าอยากให้บทความนี้ถูกใช้เป็นเครื่องมือสอนวิชากลศาสตร์แบบฉบับเบื้องต้น (introductory classical mechanics) ด้วย เราจึงพิจารณาว่าการพลวัตของเจ้าเหมียวนั้นเป็นไปตามหลักกลศาสตร์ของนิวตัน (Newton’s mechanics) โดยมีสมมติฐานว่าเจ้าเหมียวรับรู้ถึงอิทธิพลที่กระทำต่อเขาผ่านการเหนี่ยวนำโดยคน แทนด้วยความศักย์Vcat ( δ )
พฤติกรรมที่ 2: เมื่อน้องแมวมา ( นอน ) พักบนตัวคน ไม่ว่าจะที่ตัก บนท้อง หรือที่หลังเรานั้น สิ่งเร้าเพียงน้อยนิดก็สามารถกระตุ้นให้น้องลุกออกจากตัวเราไปได้ อาทิ เห็นแมลงบิน ได้ยินเสียงที่เบาเพียงนิดเดียว ( จนมนุษย์ไม่อาจได้ยิน ) หรือแม้แต่การสลายตัวเป็นอนุภาคเบต้าของอะตอมในกาแล็กซีข้างเคียงก็ด้วย ( อันหลังสุดนี่ออกแนวประชดนะครับ ) สิ่งเร้า หรือสิ่งรบกวนนี้ต้องรุนแรงแค่ไหนจึงจะทำให้น้องลุกออกไปนั้นขึ้นกับว่าน้องติดคนที่เขาทับอยู่มากแค่ไหน
พฤติกรรมที่ 3: เมื่อน้องแมวถูกลูบตามตัว น้องจะเคลื่อนที่ไปมาเป็นการเคลื่อนที่แบบสั่น
พฤติกรรมที่ 4: เมื่อน้องแมวถูกเรียกโดยคน เขาจะไม่ค่อยตอบรับ
พฤติกรรมที่ 5: เมื่อน้องแมวตัดสินใจเดินเข้าหาคนที่เรียกเขา น้องมักถูกดึงดูดความสนใจไปได้ง่ายระหว่างทาง ทำให้มาไม่ถึง
พฤติกรรมที่ 6: ยามค่ำคืน น้องแมวมักจะวิ่งแบบสุ่มข้ามฟากของบ้านไปมา เราเรียกพฤติกรรมแบบนี้ว่า ซูมมี่ส์ (zoomies)
พฤติกรรมที่ 7: น้องแมวครางด้วยเสียงสั่นอย่างเบา ๆ (purr) ออกมาเมื่อเขาถูกใจในฝีมือการลูบของคน
น้องแมวที่บ้านคุณผู้อ่าน หรือที่คุณผู้อ่านเคยเจอเป็นแบบนี้เหมือนกันไหมครับ?
คุณ Anxo ได้กำชับไว้ในบทความว่าแบบจำลองของเขานั้นสนใจแค่ ปฏิสัมพันธ์ของแมวกับมนุษย์ในระบบที่มีแมวหนึ่งตัว และมีมนุษย์ที่อยู่นิ่ง ๆ เพียงหนึ่งคนเท่านั้น และกล่าวอีกว่าพฤติกรรมทั้ง 7 นี้อาจไม่ได้พบเจอเหมือนกันในแมวทุกตัวก็ได้ โดยแมวแต่ละตัวจะแสดงพฤติกรรมทั้ง 7 นี้ออกมามากน้อยแตกต่างกันไปแต่ละตัว อีกทั้งยังออกตัวว่างานนี้เป็นงานเชิงทฤษฎีที่มุ่งหวังผลในเชิงการศึกษาฟิสิกส์ โดยไม่ได้มีการทดลองอะไรในสัตว์ ( การทำการทดลองในสัตว์มีขั้นตอนที่ยุ่งยาก และจำเป็นต้องมีเอกสารรับรองครับ จึงต้องออกตัวครับ )
ทีนี้เราจะมาดูที่สมการแมวเหมียว (cat’s equation) กันนะครับ เนื่องจากคุณ Anxo มีวัตถุประสงค์แต่แรกแล้วว่าอยากให้บทความนี้ถูกใช้เป็นเครื่องมือสอนวิชากลศาสตร์แบบฉบับเบื้องต้น (introductory classical mechanics) ด้วย เราจึงพิจารณาว่าการพลวัตของเจ้าเหมียวนั้นเป็นไปตามหลักกลศาสตร์ของนิวตัน (Newton’s mechanics) โดยมีสมมติฐานว่าเจ้าเหมียวรับรู้ถึงอิทธิพลที่กระทำต่อเขาผ่านการเหนี่ยวนำโดยคน แทนด้วยความศักย์
\(m\dfrac{d^2x}{dt^2} = - \dfrac{d}{dx}v^{(δ)}_{cat} - ϵ\dfrac{dx}{dt'}\) .......สมการที่ 1
เมื่อ
 ใด ๆ โดยกำหนดให้มนุษย์อยู่ที่ตำแหน่ง
ใด ๆ โดยกำหนดให้มนุษย์อยู่ที่ตำแหน่ง  เป็นมวลของแมวซึ่งมีค่ามากกว่าศูนย์ และกำหนดให้
เป็นมวลของแมวซึ่งมีค่ามากกว่าศูนย์ และกำหนดให้  คือสัมประสิทธิ์ความหน่วงโดยมีขนาดมากกว่า
คือสัมประสิทธิ์ความหน่วงโดยมีขนาดมากกว่า  และแปรเปลี่ยนไปตามแมวแต่ละตัว ระบบนี้เป็นระบบ 3 มิติ แต่เพื่อให้ง่าย เราจะพิจารณาใน 1 มิติ
และแปรเปลี่ยนไปตามแมวแต่ละตัว ระบบนี้เป็นระบบ 3 มิติ แต่เพื่อให้ง่าย เราจะพิจารณาใน 1 มิติสมการนี้สามารถอธิบายคร่าว ๆ ได้ว่าฝั่งขวามือคืออิทธิพลต่าง ๆ ที่กระทำต่อระบบ ( แมว ) ก้อนแรกคืออิทธิพลอันเกิดจากปฏิสัมพันธ์กับคน อีกก้อนเกิดจากความหน่วง ซึ่งความหมายของมันจะถูกพูดถึงในลำดับต่อไป ทางซ้ายมือนั้นแสดงการตอบสนองของระบบต่ออิทธิพลต่าง ๆ ซึ่งจะออกมาในลักษณะของการเปลี่ยนตำแหน่ง
 ไปตามเวลา
ไปตามเวลา 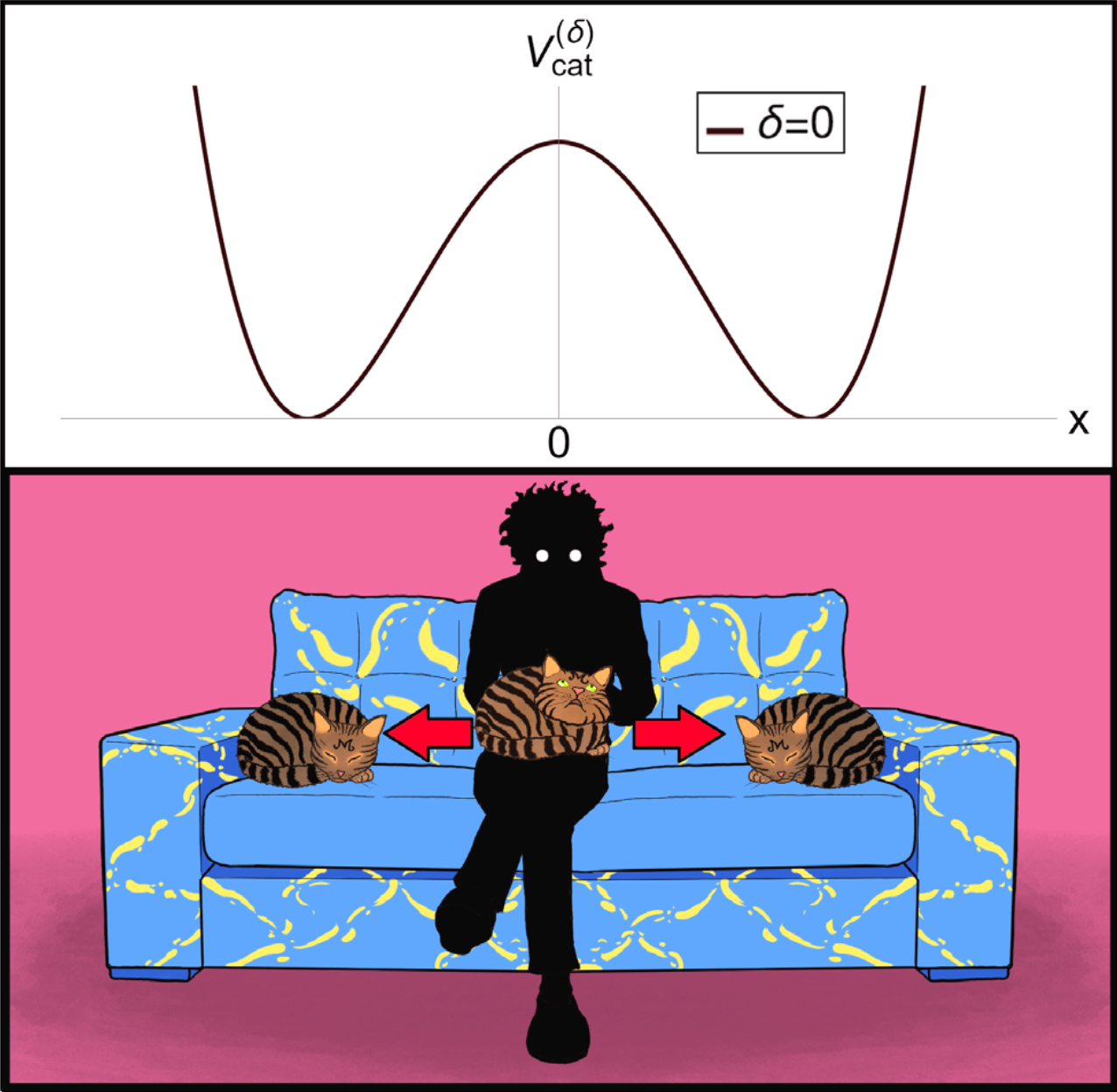
รูปที่ 2: รูปแสดงตำแหน่งจุดพักของน้องแมว ซึ่งตรงกับบริเวณที่กราฟด้านบนมีความชันเป็นศูนย์ โดยตำแหน่งที่คน ( เงาดำ ) นั่งอยู่ (
คำถามต่อมาคือเจ้าความศักย์นี้มีหน้าตาเป็นอย่างไร คุณ Anxo ได้เสนอว่าหากเราเขียนความศักย์นี้เป็น
\(V_{cat}^{(δ)}(X) = g(x^2-1)X^2\dfrac{x^2-δ}{x^2+δ}\) .......สมการที่ 2
ฟังก์ชันนี้มีความพิเศษเชิงคณิตศาสตร์คือ มันอนุญาตให้เรามีความควบคุมเหนือจุดสมดุล คือเราสามารถเลือกตำแหน่งให้จุดสมดุลได้ และยังเลือกเสถียรภาพให้กับสมดุลนั้นได้อีกด้วย โดยตัวแปร g  คือตัวแปรคู่ควบใส่มาเพื่อความเป็นรูปทั่วไปของฟังก์ชัน มีค่ามากกว่าศูนย์ แต่ในงานนี้จะให้
คือตัวแปรคู่ควบใส่มาเพื่อความเป็นรูปทั่วไปของฟังก์ชัน มีค่ามากกว่าศูนย์ แต่ในงานนี้จะให้ g = 1 δ  นั้นมีความสำคัญ มีค่าตั้งแต่
นั้นมีความสำคัญ มีค่าตั้งแต่ 0 1  เป็นตัวบอกว่าเจ้าเหมียวติดคนที่เขาอยู่ด้วยขนาดไหน
เป็นตัวบอกว่าเจ้าเหมียวติดคนที่เขาอยู่ด้วยขนาดไหน δ = 0 x = 0 δ > 0 δ  เข้าใกล้
เข้าใกล้ 1 δ = 1
คือตัวแปรคู่ควบใส่มาเพื่อความเป็นรูปทั่วไปของฟังก์ชัน มีค่ามากกว่าศูนย์ แต่ในงานนี้จะให้ นั้นมีความสำคัญ มีค่าตั้งแต่ ถึง เป็นตัวบอกว่าเจ้าเหมียวติดคนที่เขาอยู่ด้วยขนาดไหน เข้าใกล้ มากหลุมยิ่งลึก น้องยิ่งติดคนมาก สลัดออกยาก คุณผู้อ่านเป็นคนที่โชคดีคนนั้นที่มีค่าผูกพันกับน้องสูงสุด (
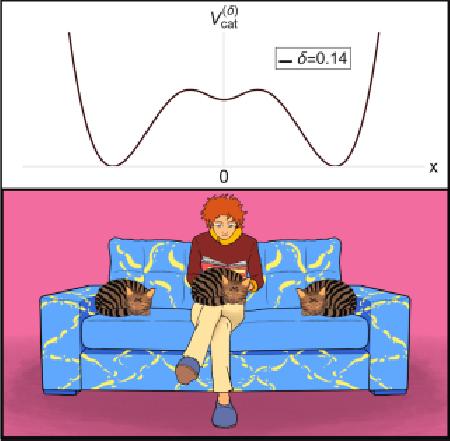
รูปที่ 3: รูปแสดงตำแหน่งจุดพักของน้องแมว ซึ่งตรงกับบริเวณที่กราฟด้านบนมีความชันเป็นศูนย์ โดยตำแหน่งที่คนนั่งอยู่ (
นอกจากนั้นแล้วฟังก์ชันคณิตศาสตร์นี้ยังมีพฤติกรรมลู่เข้าค่าอนันต์ทางบวก เมื่อระยะห่างจากจุดที่คนนั่งอยู่ (
ณ จุดนี้ พจน์ความหน่วงถูกใส่เข้าไป เพื่อลดพลังงานการเคลื่อนที่ของแมว และทำให้แมวสามารถหยุดพักได้เมื่อเวลาผ่านไปขณะหนึ่ง โดยอัตราการเสียพลังงานในหนึ่งหน่วยเวลาสามารถเขียนได้ว่า
\(\dfrac{dE}{dt} = -ϵ (\dfrac{dx}{dt})^2\) .......สมการที่ 3
เครื่องหมายลบแสดงการสูญเสียพลังงานของระบบ เพราะ
มีค่าเป็นบวก และปริมาณที่ยกกำลังสองในระบบจำนวนจริงย่อมมีค่าไม่ติดลบ หากไม่มีพจน์นี้น้องแมวของเราคงได้วิ่งไปแบบไม่มีวันหยุด คงเหนื่อยแย่เลยครับ … สำหรับตอนแรกก็ขอปูพื้นฐานให้คุณผู้อ่านไว้เท่านี้ก่อนนะครับ แล้วเราค่อยมาเจาะลึกที่แต่ละพฤติกรรมกันอย่างละเอียดในตอนต่อไปเอกสารอ้างอิง:
[1] Biasi, A. (2024). On cat–human interaction from the viewpoint of physics: An equation of motion. American Journal of Physics, 92(11), 827-833.
[2] Blundell, S. J., & Blundell, K. M. (2010). Concepts in thermal physics. Oup Oxford.
บทความโดย:
ภัทรพล ธนลิขิต
นักวิจัยด้านฟิสิกส์พลังงานสูงเชิงทฤษฎี และฟิสิกส์ของอะตอมเย็นสุดขีดเชิงปฏิบัติการ
ภาควิชาฟิสิกส์ สถาบันชั้นสูงวิทยาศาสตร์ และเทคโนโลยี เกาหลี
บทความฟิสิกส์ล่าสุด
 ฟิสิกส์ของปฏิสัมพันธ์ระหว่าง แมว กับคน … เมื่อน้องแมวถูกนำมาช่วยสอนฟิสิกส์ ( ตอนที่ 1: เกริ่นนำ )
17-03-2025
ฟิสิกส์ของปฏิสัมพันธ์ระหว่าง แมว กับคน … เมื่อน้องแมวถูกนำมาช่วยสอนฟิสิกส์ ( ตอนที่ 1: เกริ่นนำ )
17-03-2025
 หรือว่าเราอาศัยอยู่ในโฮโลแกรม ?
24-10-2024
หรือว่าเราอาศัยอยู่ในโฮโลแกรม ?
24-10-2024
